
Überblick
Brückenkrane, allgemein bekannt als „Fahren“, sind eine Art Hebemaschine, die in Industrie- und Bergbauunternehmen weit verbreitet ist. Ihr Betriebsmechanismus besteht aus drei grundsätzlich unabhängigen Antriebssystemen, einem Autoantriebssystem, einem Hakenantriebssystem und einem K-DRIVE-Wechselrichter Die oben genannten drei Fahrsysteme wurden erfolgreich reformiert. Im Folgenden wird hauptsächlich der Transformationsprozess des Fahrsystems vor und nach dem Gehen beschrieben.

Schema Vorteile
- Feldorientierte Stromvektorregelung mit offenem Regelkreis, vollständig entkoppelte Motorvariablen, großes Niederfrequenzdrehmoment, schnelle Reaktion usw.;
- KD600 übernimmt den PG-freien Vektorsteuerungsmodus mit offenem Regelkreis und den vektorisierten V/F-Modus und verstärkt die Leistungsstufenkonfiguration des ersten Gangs;
- Frequenzbereich: 0,5-600 Hz Segmenteinstellung, stufenlose stufenlose Einstellung;
- Arbeitsspannungsbereich: 380 V ± 20 %, und die Busspannung fällt für einen störungsfreien Betrieb sofort auf 360 V DC ab;
- Überlastfähigkeit: 150 % des Nennstroms, 1 Minute zulässig; 200 % Nennstrom, 1 s zulässig;
- Drehmomenteigenschaften: Anlaufdrehmoment, größer als das 2-fache des Nenndrehmoments; Niederfrequentes Drehmoment, größer als das 1,6-fache des Nenndrehmoments bei 1 Hz; Das Bremsmoment ist größer als das Nennmoment.
Betriebseigenschaften
- Der Kranhubmechanismus hat ein großes Anlaufdrehmoment, das in der Regel 150 % des Nenndrehmoments übersteigt. Unter Berücksichtigung von Überlast und anderen Faktoren müssen während des Anfahr- und Beschleunigungsvorgangs mindestens 200 % des Nenndrehmoments bereitgestellt werden;
- Wenn der Hebemechanismus nach unten läuft, befindet sich der Motor im Zustand der regenerativen Stromerzeugung und muss Energieverbrauch bremsen oder regenerative in das Netz einspeisen;
- Die Last des Hebemechanismus ändert sich dramatisch, wenn das angehobene Objekt den Boden verlässt oder berührt, und der Frequenzumrichter muss in der Lage sein, die Stoßlast reibungslos zu steuern;
- Da die Fahrgeschwindigkeit des vorderen und hinteren Fahrmechanismus des Krans während der mechanischen Konstruktion nicht hoch ist, kann der Konverter für eine angemessene Übergeschwindigkeit verwendet werden, um die Arbeitseffizienz zu verbessern.
Einfacher Schaltplan
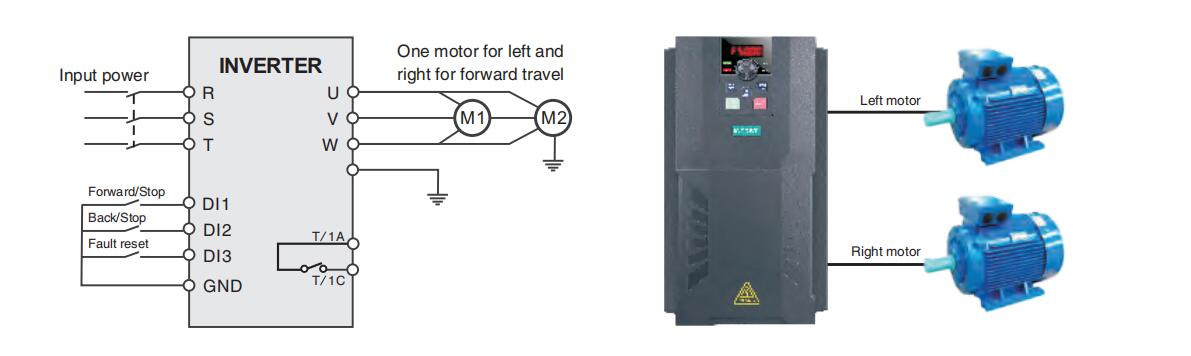
Parametereinstellungenng und Beschreibung(Fahrparameter für den linken und rechten Motor)
| Parameter | Erklären | Parametereinstellung | Erklären |
| P0-00=0 | VF-Steuerung | P5-00=1 | nach vorne |
| P0-04=1 | Externer Terminal-Start-Stopp | P5-01=2 | später durchführen |
| P0-06=1 | Digitale Frequenzeinstellung | P6-00=2 | Fehlerausgang Relais 1 |
| P0-14=60,00 | Maximale Frequenz | P4-01 = 1,6 kW | Angeschlossene Motorleistung |
| P0-16=60,00 | Obere Grenzfrequenz | P4-02=380V | Nennspannung des Motors |
| P0-11=60,00 | Digitale Einstellfrequenz | P4-04=3,3A | Motornennstrom |
| P0-23=3,0s | Beschleunigungszeit | P4-05=50Hz | Nennfrequenz des Motors |
| P0-24=2,0s | Verzögerungszeit | P4-06 = 960 U/Min | Nenndrehzahl des Motors |
| Hinweis: Wenn ein Frequenzumrichter mit zwei Motoren verwendet wird, wird dringend empfohlen, an der Vorderseite jedes Motors ein passendes Thermorelais zu installieren, um jeden Motor zu schützen. | |||
Analyse der Betriebseffekte
Der Frequenzumrichter der Serie KD600 hat eine Frequenzumwandlungstransformation am Fahrsystem durchgeführt, und der Transformationseffekt ist relativ ideal, was sich hauptsächlich in Folgendem zeigt:
- Der Sanftanlauf und der Sanftstopp während des Startvorgangs werden realisiert, wodurch die Auswirkungen auf das Stromnetz reduziert werden.
- Nach der Verwendung des Frequenzumrichters entfallen das ursprüngliche Schaltschütz und der Geschwindigkeitsregelwiderstand, was nicht nur Wartungskosten spart, sondern auch die Ausfallzeiten für die Wartung reduziert und somit die Leistung erhöht;
- Wenn der Haupthaken mit 5 Hz bis 30 Hz arbeitet, ist der Energiespareffekt sehr offensichtlich;
- Der Frequenzumrichter wird zur Steuerung der Vorder- und Hinterfahrt verwendet, und die linke und rechte Fahrmechanismusreihe kann die Überfrequenzarbeit realisieren. Unter der Voraussetzung der Gewährleistung der Sicherheit wird die Arbeitseffizienz erheblich verbessert und auch der Wartungsaufwand der Fahrausrüstung aufgrund des häufigen Austauschs von Wechselstromschützen verringert.
Schlussbemerkungen
Der Frequenzumrichter dient zur Steuerung des Vorwärts- und Rückwärtslaufs sowie der linken und rechten Laufmechanismusreihe, wodurch Übertaktungsarbeiten realisiert werden können, die Arbeitseffizienz unter der Voraussetzung der Gewährleistung der Sicherheit erheblich verbessert wird und auch der Wartungsaufwand der Fahrausrüstung dadurch verringert wird häufiger Austausch von Wechselstromschützen.
Bewerbungsseite

Zeitpunkt der Veröffentlichung: 17. November 2023